これまでの介護施設での作業観察において、介護職員が移乗介助を行う際に不良姿勢が多発していることがわかりました。また、移乗介助は利用者が排泄や入浴、食事などで移動するときに不可欠な介助であり、利用者の自立にも大きく影響するものであることから、平成29年度には移乗介助業務において移乗支援機器(非装着型)を活用する実証を行いました。
その結果、介護職員の移乗介助の際の不良姿勢が大幅に改善されましたが、一方で、機器の操作手順やスリングシートの脱着時間に職員間で大きな差が生じたことや、利用者の状態や施設環境によっては機器が適合しない可能性があるなど、単に機器を導入するだけでは有効に活用することができないということがわかりました。
そこで、平成30年度は、厚生労働省の「介護ロボットを活用した介護技術開発支援モデル事業実施業務(移乗介助(非装着))」を受託し、移乗支援機器(非装着型)を介護施設に導入するにあたり、「機器の活用方法を徹底することで、年齢や性別、経験年数等に関わらず、誰でも使いこなせるようになる」という仮説を検証するための実証を行いました。
さらに、実証の成果を踏まえ、移乗介助分野における「介護ロボット導入マニュアル」「介護ロボットを活用した介護方法の手順書」を作成しました。
平成30年度の成果(厚生労働省委託モデル事業)
更新日 : 2023年6月30日
ページ番号:000153326
タイムトライアル結果
- 移乗支援機器(非装着型)による移乗介助の前後のスリングシートの脱着時間については個人差が大きく、また、機器による移乗介助で最も時間を要する作業であったため、導入教育などによる作業の平準化を図ることで、機器による移乗介助の全体時間を縮減することができると考えられます。
- 実証の中で操作時間の面からみた習熟度が全施設で向上していることから、機器を効果的に活用するために作成した機器活用マニュアルについて、一定の有効性を確認できました。
- 移乗支援機器(非装着型)の操作については、事前の導入教育やOJTを十分に行うことにより、実証期間(約3週間)の中でほぼ全職員が一人で機器を操作できるようになることが確認できました。
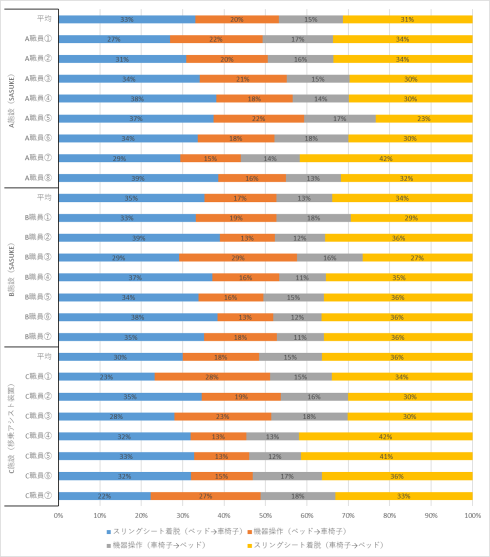
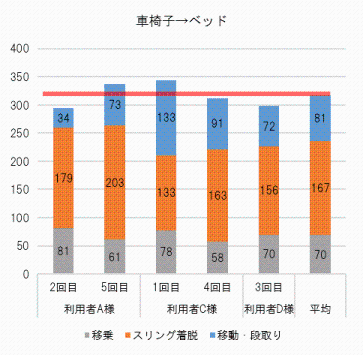
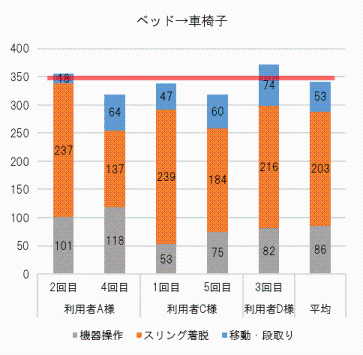
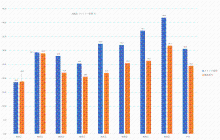
移乗支援機器(非装着型)使用による作業時間の割合(段取りを除く)
SASUKE、移乗アシスト装置の2機種を導入・実証しましたが、各施設の平均値から、ともに機器の操作時間は移乗介助作業全体の3割から4割程度であるのに対し、スリングシートの脱着は6割から7割程度とより多くの時間がかかっています。
非装着型の移乗介助機器を効果的に活用するためには、スリングシートの着脱をいかに円滑に行うかが鍵と考えられます。
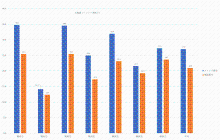
移乗支援機器使用による移乗の観察初期と後期の作業時間の比較(単位:秒)
3施設とも、合計では実証初期に比べ、実証後期に作業時間の短縮が見られ、スリングシート脱着や機器操作の習熟度が上がっています。
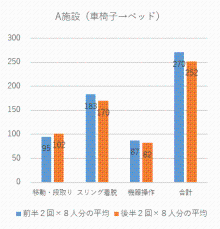
合計6.7%短縮
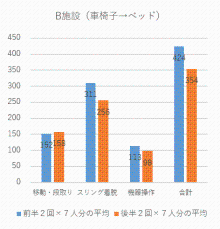
合計16.5%短縮

合計22.4%短縮
手順書や導入研修の効果
職員によって差があるものの、事前の訓練が十分であった職員は、移乗支援機器による移乗介助がどの利用者でもほぼ一定の時間で介助できています。
姿勢評価
機器による移乗介助については、人の手による介助より時間がかかるものの、介助者の身体への負荷の程度を示す大きな体幹傾斜の発生が減少しており、職員の負担軽減に対する機器の有効性を確認できました。
2名で移乗介助を行ったときの平均体幹傾斜角(単位:°)
-20°より小さくなるほど、前屈状態の傾斜が大きい姿勢です。2施設の平均は約-30°となっており、抱え上げ等による不良姿勢が出現しています。
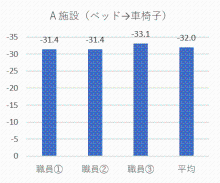
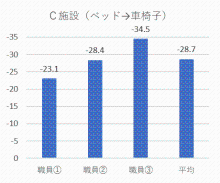
移乗支援機器による移乗介助での平均体幹傾斜角(単位:°)
移乗支援機器使用時には、2施設を平均すると約-22°と傾斜は小さく、徒手での移乗介助の場合からの改善が見られます。なお、スリングシート脱着時においては、徒手による移乗介助を行った時に近い前屈状態の傾斜が大きい姿勢が出現しています。
介護ロボット導入マニュアル/介護ロボットを活用した介護方法の手順書
介護ロボット導入マニュアル
介護ロボット等を介護施設で効果的に導入・活用するための手法として、介護現場での業務課題の抽出等を行うための「介護業務版アクションチェックリスト」を独自に作成し、その活用を含む介護施設における機器の導入から活用、活用状況の評価、改善までを一貫して行う、PDCAサイクルを用いた検討手法を中核とする「介護ロボット導入マニュアル」を作成しました。
介護ロボットを活用した介護方法の手順書
機器メーカーと協力しながら、移乗支援機器の効果的な活用に関する工夫などを反映させた、「介護ロボットを活用した介護方法の手順書」を作成しました。
なお、本手順書には介護職員のスキルアップによる介護サービスの質の向上を図るため、介護施設で実際に行われている移乗などの介助作業を基に、運動力学の視点から動作分析等を踏まえた参考とすべき介助方法の手順を整理し、盛り込みました。
一部のファイルをPDF形式で提供しています。PDFの閲覧にはAdobe System社の無償ソフトウェア「Adobe Reader」が必要です。 下記のAdobe Readerダウンロードページなどから入手してください。
Adobe Readerダウンロードページ(外部リンク)
このページの作成者
保健福祉局先進的介護システム推進室
〒803-8501 北九州市小倉北区城内1番1号
電話:093-582-2712 FAX:093-582-2095